





























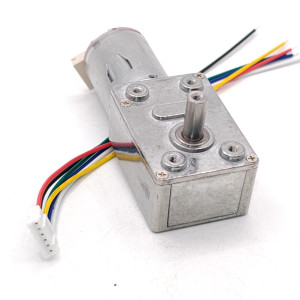








Модуль Энкодера
- Модель:Encoder Rotation Sensor
- Доступно:23 шт.
- Вес:30.00 г
- Размеры (Д x Ш x В):40.00 x 30.00 x 30.00 мм
Модуль Энкодера
Данный модуль представляет собой инкрементальный оптический энкодер, преобразующий механическое вращение вала в цифровые импульсы. Ключевым преимуществом является высокая надежность и долговечность, обеспечиваемая бесконтактным принципом работы, что исключает износ компонентов в сравнении с потенциометрическими датчиками. Он обеспечивает точное определение угла поворота, направления вращения и скорости с дискретностью, задаваемой количеством импульсов на оборот (PPR), что критически важно для систем позиционирования, управления двигателями и измерения скорости в робототехнике и автоматизации.
Модуль отличается простотой интеграции благодаря стандартизированному цифровому выходу (два квадратурных канала) и часто встроенному декодору, предоставляющему уже обработанные сигналы. Это позволяет микроконтроллеру эффективно отслеживать вращение с минимальной вычислительной нагрузкой. Конструкция с подшипником качения обеспечивает стабильную работу вала при умеренных радиальных нагрузках, а компактный форм-фактор адаптирован для установки в конечные устройства.
- Тип: Оптический энкодер
- Напряжение питания: 3.3В
- Тип выхода: Цифровой
- Рабочая температура: [напр., -10°C до +70°C]
Принцип работы и применение в проектах
Оптический энкодер внутри модуля состоит из светодиода, вращающегося диска с прорезями (прикрепленного к валу) и фотодетектора. При вращении вала световой поток прерывается, и детектор генерирует серию импульсов. Два канала (A и B) смещены друг относительно друга на 90 градусов, что позволяет по фазовому сдвигу между ними однозначно определять направление вращения. Подсчет количества импульсов определяет угол поворота, а частота их следования – скорость.
В робототехнике такие датчики устанавливаются непосредственно на вал двигателя или колесо для реализации точного одометрии (определения пройденного пути). В станках с ЧПУ и 3D-принтерах они используются для обратной связи по положению шаговых или серводвигателей, повышая точность и надежность системы. В устройствах ручного ввода (энкодерные ручки, регуляторы) модуль обеспечивает интуитивное и плавное управление.
Важно понимать, что инкрементальный энкодер, в отличие от абсолютного, определяет относительное перемещение от момента включения. Для определения абсолютного положения при старте системе требуется процедура инициализации (например, выход на референтный метку – индексный импульс Z). Также при подключении необходимо предусмотреть программную или аппаратную защиту от дребезга контактов (дебаунсинг), хотя многие современные модули имеют встроенную фильтрацию сигнала.
Пока не было вопросов.